
Programação de Robôs

DELMIA Robotics na plataforma Dassault Systèmes 3DEXPERIENCE® pode oferecer programas de alta qualidade e livres de colisão no idioma nativo do robô, sem necessidade de intervenção no chão de fábrica.
No mundo virtual, programadores e designers trabalham em conjunto para criar as operações de ferramentas mais produtivas e os tempos de ciclo do robô. A programação pode avançar independentemente, sem interromper a produção, e os programas de robôs têm um desempenho previsível na primeira vez. Os custos de programação e produção são significativamente reduzidos e os produtos passam ao mercado mais rapidamente.
![]()
Programação de Robôs Off-Line
Oferece um ambiente 3D para criar, programar, simular e validar toda uma célula de trabalho do robô.
Os programadores podem utilizar recursos de posicionamento, programação e validação dos movimentos das trajetórias, como também estabelecer as conexões de entrada e saída entre robôs, controladores e outros dispositivos.
Avançados recursos de calibração para melhorar a precisão do programa em aplicações que necessitem um alto grau de precisão em suas trajetórias de robôs.
Formato Visual Basic para importação e exportação de programas, isso permite desenvolver facilmente novos tradutores ou estender as funcionalidades dos tradutores existentes para atender a requisitos personalizados.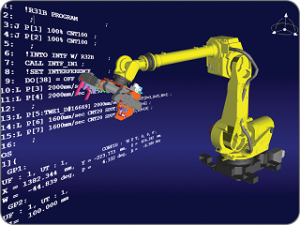
Destaques:
- Rápido layout da estação de trabalho
- Intuitiva programação de robôs
- Suporte a entrada e saída de dispositivos
- Exatidão no ciclo de tempo dos processos
- Tradutor de programas para 8 fabricantes de robôs
- Tradutores customizados utilizando VB.net
- Ferramentas de calibração para alinhamento físico e virtual
Programação de Robôs de Solda a Ponto
Com abrangentes recursos para processos automotivos BIW (Body-in-white). 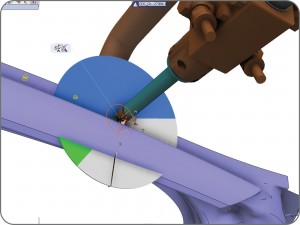 Planejamento da trajetória do robô, seleção da pinça e analise de solda para rápida ação dos programadores em novos projetos ou mudanças nos produtos.
Planejamento da trajetória do robô, seleção da pinça e analise de solda para rápida ação dos programadores em novos projetos ou mudanças nos produtos.
Atualização automática do programa quando a mudança no projeto causa impacto na localização ou orientação do ponto de solda, ajustando a trajetória do robô.
Destaques:
- Realize análises de solda de maneira rápida e intuitiva
- Equilibre as soldas entre vários robôs na célula ou em toda a linha
- Função dedicada acelera os estudos de solda
- Ferramentas otimizadas de posicionamento de robôs
Programação de Robôs de Solda a Arco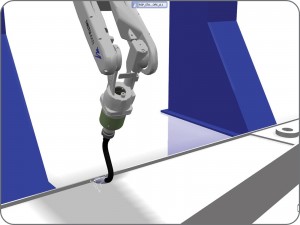
Com recursos para gerar automaticamente o percurso da ferramenta de solda baseado no desenho geométrico da costura a ser soldada. Diversas variáveis são combinadas ao definir o caminho de soldagem robotizada livre de colisões, incluindo a configuração do conjunto, a configuração do robô e o layout da célula de trabalho.
Destaques:
- Gerar rapidamente trajetórias de solda por costura com base no design do produto
- Simular perfis de solda específicos do controlador
- Simular o movimento do robô sincronizado com mais de 6 eixos auxiliares para posicionadores de peças e robôs
Programação de Robôs de Pintura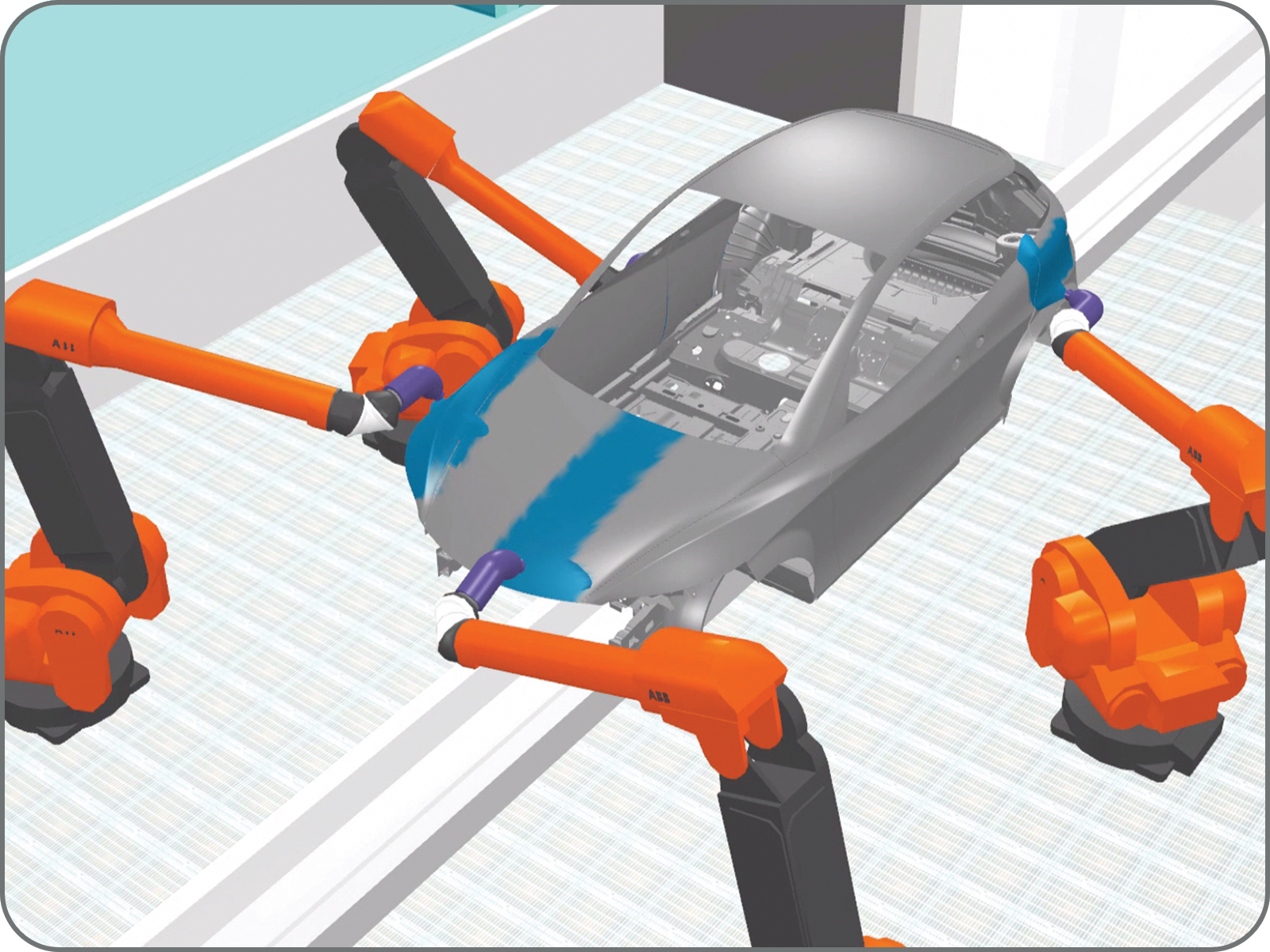
Facilita a criação e a simulação de processos de superfície robótica, incluindo pulverização, varredura, retificação e acabamento. Permite que os engenheiros de simulação usem a geometria do produto para validar células de trabalho robóticas e processos avançados de robôs no contexto imersivo do ambiente 3D.
Destaques:
- Criar facilmente trajetórias precisas do robô utilizando a superfície 3D
- Criar várias passagens com a sobreposição desejada
- Representação gráfica da deposição de material
- Os recursos de rastreamento de linha ajudam a fornecer a simulação mais precisa
- Modelar os parâmetros de bico de pulverização e pressão da pistola para depósito de material
Definição de tarefas dos robôs
Para criação, programação, simulação e validação de toda uma célula de trabalho com robôs para todas as indústrias de manufatura. Os programadores podem posicionar vários recursos, programar robôs individuais, validar as trajetórias de movimento e estabelecer o I/O de conexões entre os controladores de robôs e outros dispositivos.
Ferramenta interativa de sequenciamento que permite aos usuários criar uma lógica completa da área de trabalho pelo sequenciamento de diferentes robôs ou programas de dispositivos. Neste ambiente 3D interativo, o usuário é capaz de executar estudos de viabilidade, criando programas otimizados sem interferências para as operações realizadas na célula de trabalho.
Uma rica biblioteca com mais de 1500 modelos de robôs e controladores dos principais fabricantes de robôs industriais é fornecida para apoio aos programadores em suas tarefas de layout e programação.
Consulte a TECMES para informações sobre as soluções DELMIA® – Programação de Robôs
Solicite uma cotação, ou agende uma demonstração WEB para definir a melhor solução para sua empresa
