
Layout e Simulação de Células Robotizadas
SIMULE E VALIDE A MOVIMENTAÇÃO DE ROBÔS INDUSTRIAIS
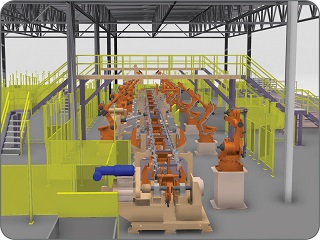
Ambiente 3D interativo onde os Engenheiros de Simulação podem criar, simular e validar toda a célula de trabalho dos robôs para qualquer setor. Os engenheiros de simulação podem posicionar recursos, simular robôs, criar trajetórias de robôs e criar uma sequência completa da célula de trabalho.
Podem definir, validar e otimizar os processos e configurações robóticas antes da entrega ao chão de fábrica.
Caso de Sucesso
Inclui uma extensa biblioteca e controladores dos principais fabricantes de robôs industriais para suportar o layout e simulação. Esses recursos melhoram simultaneamente a qualidade, reduzem custos e maximizam a utilização de recursos, mantendo os equipamentos de produção envolvidos em atividades de valor agregado.
Layout rápido e simples da célula de trabalho com robôs
O posicionamento automático e as ferramentas de envelope do espaço de trabalho ajudam os usuários a posicionar o robô em uma localização acessível e se beneficiar de estudos de viabilidade iniciais.
» Ferramentas intuitivas para definição do layout e recursos.
» A integração do desenho 2D do layout suporta a definição do layout 3D.
» Catálogos de objetos industriais paramétricos.
» Detecção de interferências no ambiente de simulação 3D.
Estudos de Viabilidade e resolução de problemas de design para a manufatura
Permite que os usuários realizem estudos de viabilidade das tarefas do robô no início das etapas de planejamento e detalhamento, reduzindo o custo de retrabalho gerado por alterações de produto e ferramental.
Criação, simulação e validação de tarefas de robôs no contexto de manufatura
Permite que os usuários criem e validem tarefas de robôs em uma variedade de contextos de fabricação. Isso resulta no melhor entendimento possível de como as variáveis de movimento afetarão a definição da tarefa.
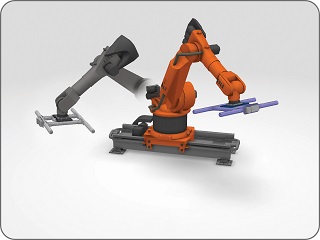
Ferramentas como o local automático do robô, o seu alcance e o envelope da área de trabalho fornecem ao usuário uma experiência interativa que mostra a localização ideal do robô.
Simular tarefas do robô utilizando o software de controle de movimento encontrado no controlador real do robô. Isso fornece uma trajetória de movimento extremamente precisa e simulações de tempo de ciclo.
Simulação simultânea dos robôs
Os Engenheiros de Simulação dos Robôs podem criar e validar simultaneamente tarefas de robôs individuais em uma única célula de trabalho, linha de montagem ou em toda uma fábrica. À medida que cada usuário conclui seu trabalho, os detalhes da tarefa do robô tornam-se disponíveis para todas as partes interessadas e são incorporados ao processo pai, de modo que vários usuários incorporam simultaneamente o próprio trabalho ao coletivo.
Maior produtividade para engenheiros de simulação
Fornece aos engenheiros uma compreensão clara do ambiente do chão de fábrica e do trabalho a ser feito. A interface simplificada está baseada em contexto; por exemplo, se um usuário clicar em uma costura de solda ou trajetória de pesquisa, serão apresentados um conjunto de comandos de criação e modificação da trajetória 3D. As atualizações da trajetória do robô com um único clique ajudam a garantir que as simulações estejam atualizadas e refletem as mais recentes modificações no design do produto.
Consulte a TECMES para informações sobre as soluções DELMIA® – Layout e Simulação de Células Robotizadas
Solicite uma cotação, ou agende uma demonstração WEB para definir a melhor solução para sua empresa
